







サーボどうしの結合が簡単
ロボットの関節に最適なコマンドで作動するシリアルサーボ
Cytron社のシリアルサーボモーターです。UARTによるシリアル通信のコマンドで動作を指示することができます。数種類の形状のジョイントが用意されており、特にロボットの関節が簡単に作ることができます。デイジーチェーン接続ができるため、多関節でも配線は、すっきりとします。
生産終了品のため在庫限りです。
スロットで簡単結合
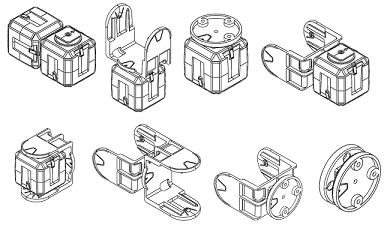
可動部の面以外の5面は、スロットが設けられています。このスロットに別のCube Servoを取り付けたり、専用ジョイントを取り付けることができます。ラチェットでロックされるため、ネジが不要で簡単に結合することができます。

ジョイントを用意
Cube Servoどうしをつないだり、板等に取り付けたりするための4種類のジョイントが用意されています。RR-UJを使用すると簡単にロボットの関節を作ることができます。
本品にRR-EJ 外部ジョイント 2個、RR-IC 相互ジョイント 1個が付属しております。

結合のバリエーション
回転角360°以上
360°以上回転させることができます。走行車輪の駆動のように一方向に無限に回転させることができます。また、プログラムのバグによる回り過ぎを防止するため、ソフトリミットを設定することもできます。
デイジーチェーン接続
デイジーチェーン接続するための送りコネクターが標準で付いているため、多軸にすることが容易です。各サーボは、ユニークな個別のIDがついているため、指令時、識別することができます。
シリアル通信で制御
TTLレベルの半二重非同期のシリアル通信(UART)のコマンドで制御を行います。
わずらわしいPWM制御を行う必要がありませんので、パソコン、マイクロコントローラーから簡単に制御を行うことができます。
最大通信速度は、500kbpsです。
本体の通信は、通信線1本で送信・受信を切り替えて行います。ホスト側は、送受信切り替えのための3ステートバッファー(74HC126など)が必要です。
Arduinoでの使用に便利なシールド、パソコンやマイクロコントローラーからの使用に便利なボードも用意されています。
回転位置・速度の指定が可能
回転角度だけではなく、回転速度、または、指定角度に達するまでの時間を指定することもできます。
読み出しも可能
回転指令を送るだけでなく、現在角度、回転速度、負荷、温度、電源電圧も読み出すことができます。
過負荷・過熱自動停止
過負荷・過熱で自動停止させることができます。その値は、変更することもできます。
LEDを装備
サーボの運転状態を示す、LEDが付いています。

高剛性エンジニアリングプラスチックボディ
15kg・cmトルクに耐えられる高剛性エンジニアリングプラスチック製のボディです。
Windows用サンプルプログラム
Windows用サンプルプログラムが用意されています(Java)。

Windows用サンプルプログラム
Windows用サンプルプログラムマニュアル
日本語マニュアルは用意しておりません。
Arduinoで簡単制御
専用のシールド、ライブラリーが用意されていますので、Arduinoで簡単に使用することができます。
Arduino ライブラリー、サンプルプログラム
Arduinoライブラリーリファレンス
応用例
仕様
電源電圧 DC9~12V
保持トルク 15kg・cm (12V時)
定格トルク 12kg・cm (12V時)
スピード 60rpm (無負荷、12V時)
ギヤ比 194:1
最大電流 1.5A (12V時)
重量 63g
回転角度 360°
通信 半二重シリアル
RoHS適合
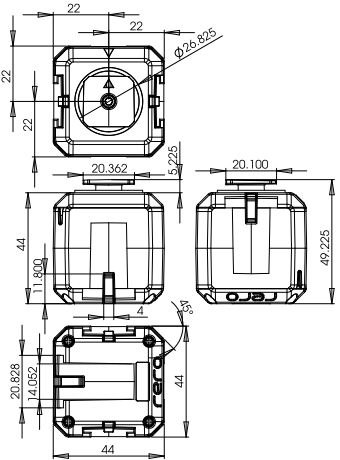
寸法図
マニュアル(英語)
日本語マニュアルは用意しておりません。
セット内容

G15 Cube Servo本体 1個
RR-EJ 外部ジョイント 2個
RR-IC 相互ジョイント 1個



{kind=link}